Curso de Robótica para niños
Programando con Bit-bloq y Freaduino
Vamos a utilizar “Mi primer kit de Robótica de BQ”:

Programa:
1. La Placa Controladora.
Aprendizaje: Contacto con el hardware.
2. El Software de programación.
Aprendizaje: Contacto con el Software.
2.1. Introducción a bitbloq.
Aprendizaje: Concepto de programación por bloque. Analogía con colores y conceptos de lógica, control, matemática, funciones y variables.
3. Conectando y programando.
Aprendizaje: Primeros pasos programando.
3.1. SALIDAS DIGITALES.
3.1.1. LED.
3.1.1.1. Encender un LED.
Aprendizaje: Pensamiento computacional. Potenciar también el trabajo colaborativo.
3.1.1.2. Automatizar un LED para encenderlo y apagarlo en el tiempo.
Aprendizaje: Concepto de medición de magnitudes físicas. Unidades de tiempo. (Control de tiempo en milisegundos).
3.1.2. Zumbador.
3.1.2.1. Haciendo notas musicales.
Aprendizaje:Pensamiento creativo. Concepto de parámetros del sonido. (Notas y frecuencias, duración en tiempo de notas y programar música y componer melodias).
3.1.3. Motor miniservo.
3.1.3.1. Moviendo un motor Servo a una posición exacta en grados de 0 a 180 grados.
Aprendizaje: Desarrollo de la percepción espacial. Concepto de Geometria. Rotación en grados. (Girar motor de 0 a 180 grados).
3.1.4. Motor Servo de Rotación continua.
3.1.4.1. Girar un motor en sentido horario, en sentido antihorario y detenerlo.
Aprendizaje: Desarrollo cognitivo. Concepto básicos de Trigonometria. Rotación en sentido horario y sentido antihorario. (Girar motor de rotación continua).
3.2. ENTRADAS DIGITALES
3.2.1. Pulsador.
3.2.1.1 Pulsador enciende led.
3.2.1.2 Pulsador que controla activación de Servo de Rotación continua.
3.2.1.3 Conectando dos Servos de Rotación continua (ruedas de un coche).
Aprendizaje: Desarrollo de la elaboración de hipótesis, orden de las acciones y la anticipación. Condicionales. Conceptos de lógica, control, matemática, funciones y variables.
3.2.2. Sensor IR.
3.2.2.1. Activación de un led con un sensor IR:
Aprendizaje: Nuevas estrategias de pensamiento y aprendizaje. Tipos de interacción directa no física.
3.3. ENTRADAS ANALOGICAS.
3.3.1. Potenciómetro.
3.3.1.1 Potenciómetro que mueve Motor mini servo.
3.3.1.2. Potenciómetro regula la frecuencia del sonido del Zumbador.
Aprendizaje: Pensamiento lógico matemático. Desarrollo cognitivo. Analogias. Seguimiento de control.
3.3.2. Sensor de Luz (Fotorresistencia o LDR).
3.3.2.1. Sensor de Luz controla movimiento de Motor miniservo.
Aprendizaje: Concepto de medición de magnitudes físicas. Medición de la luminocidad. Analogias de control.
1. La placa Controladora
Freaduino es una plataforma de hardware de código abierto, basada en la placa Arduino. Es una sencilla placa con entradas y salidas, analógicas y digitales y tiene un microcontrolador y un entorno de desarrollo, diseñada para facilitar el uso de la electrónica en proyectos multidisciplinares.
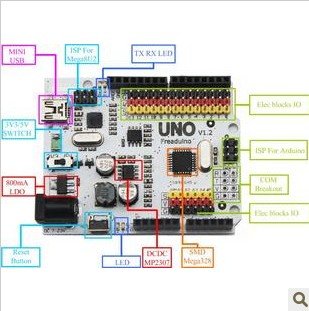
-Tiene 14 entradas y salidas digitales de la 0 a la 13 y tiene 6 entradas analogicas de la 0 a la 5.
-La placa trabaja con 5v DC de entrada y de salida.
-Cada entrada o salida se compone de 3 pines:

-negro
-rojo
-amarillo.
Al igual que los cables de los sensores. No olvidemos que es importante conectar siempre el negro con el negro, el rojo con el rojo y el amarillo con el amarillo.
2. El software de programación:
En este curso vamos a utilizas Bit-bloq como software para programar la placa Freaduino de una forma amigable y facil con modulos de colores que se encajan como un puzzle.
Este software no es descargable sino que se trabaja online, asi que para usarlo vamos a entrar en el siguiente link:
Es importante que el navegador que usemos sea “Google Chrome” y no ningun otro ya que este software solo funciona con este navegador. Si no lo tienes instalado aun, puedes descargar el instalador en el siguientye link:
Una vez ya lo tengas cargando, seguramente te pedira instalar la extension de Chrome siguiente:
bitbloq Serial Uploader
Si no te envia al link de instalacion de la extension puedes buscarla manualmente e instalarla en el siguinete link:
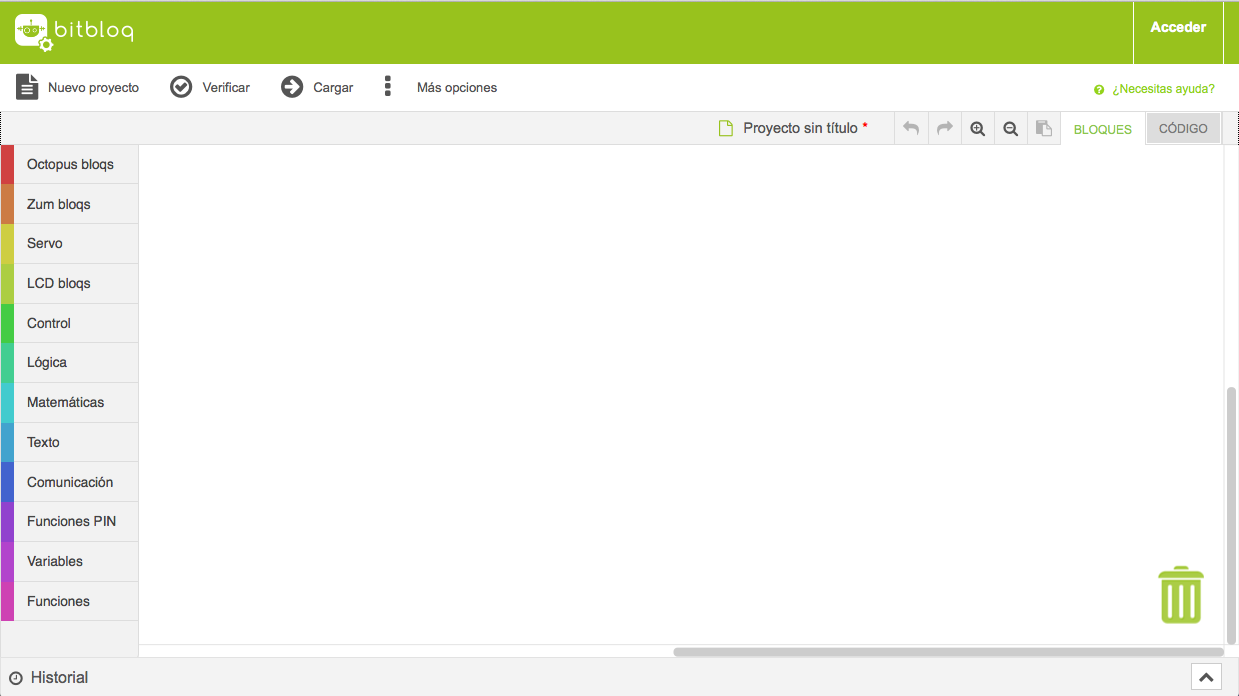
2.1. Introduccion a bitbloq
Una vez ya tengamos configurada la comunicación Serial entre la placa y el Software podemos comenzar a programar:
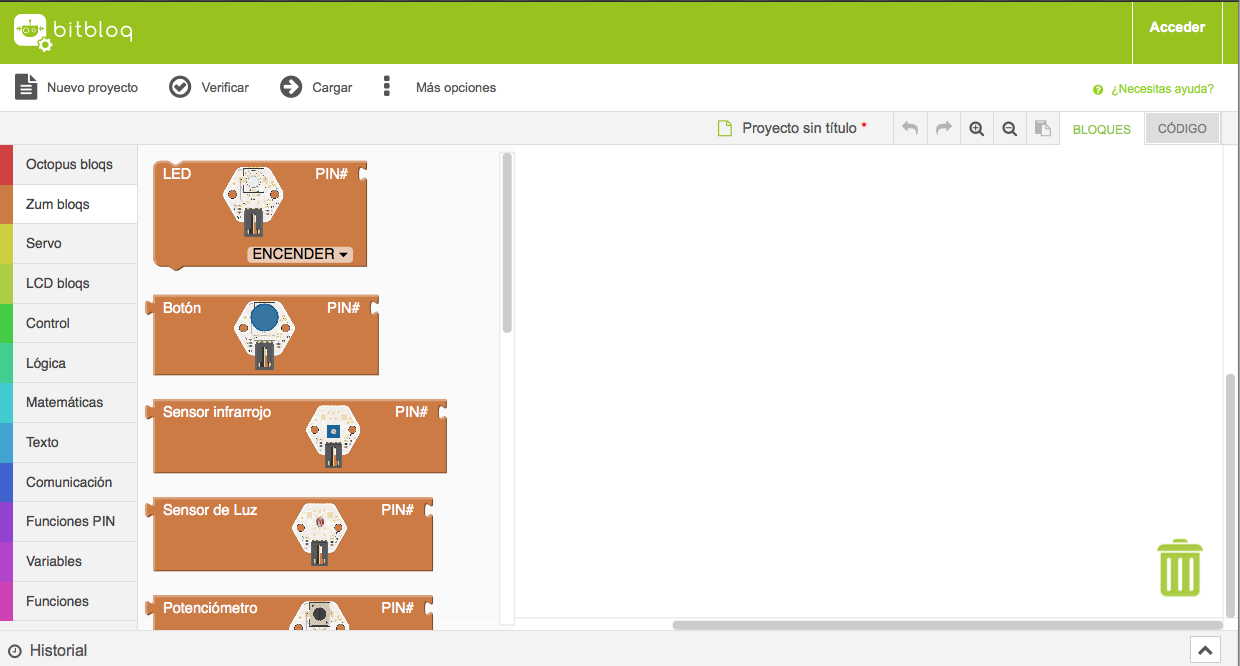
Podemos ver a la derecha del software un menu con colores.
Si seleccionamos Zum bloqs veremos la lista de todos los dispositivos que tenemos en Mi primer kit de Robótica:
3. Conectando y programando
Para comunicar la placa controladora con el software lo hacemos a través del puerto serial, la placa ya tiene un conversor de puerto serial a USB. Así que conectemos la placa al ordenador con un cable USB.
Una vez lo hayamos conectado podemos darle a Cargar para cerciorarnos que lacomunicación entre la placa y el ordenador es correcta o si falta instalar los drivers o complementos de chrome.
3.1. SALIDAS DIGITALES:
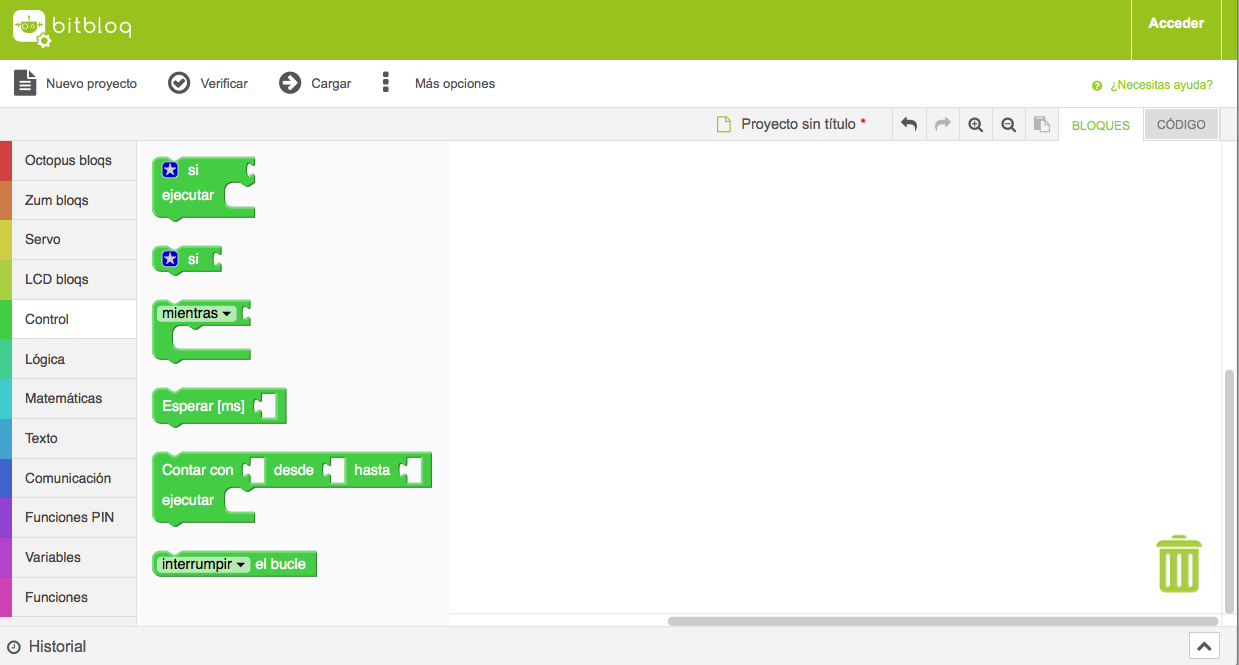
Para programar las salidas digitales debemos usar las Funciones PIN que las encontraremos en el menu de la barra de la derecha:
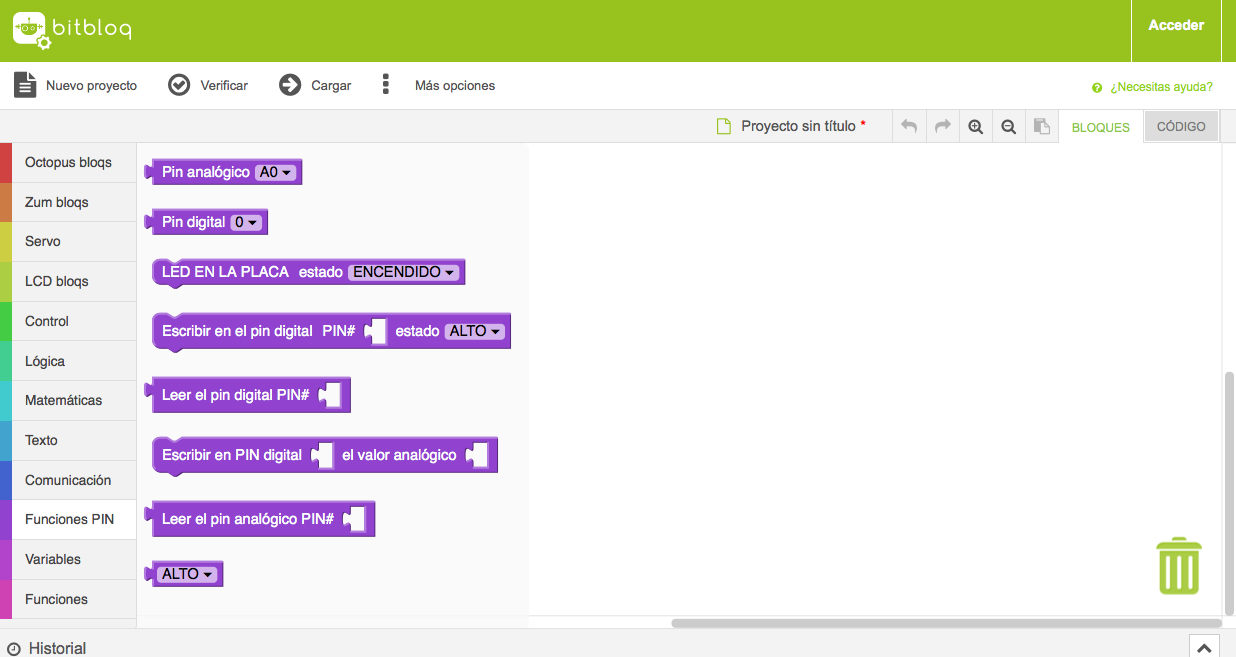
y seleccionamos Pin digital:

3.1.1. LED:
La palabra LED viene de las siglas en ingles de light-emitting diode (en español, diodo emisor de luz). Los LED son diodos semiconductores que permiten que la corriente circule únicamente en una dirección y emiten luz cuando se activan.

Ejercicios:
3.1.1.1. Encender un LED.

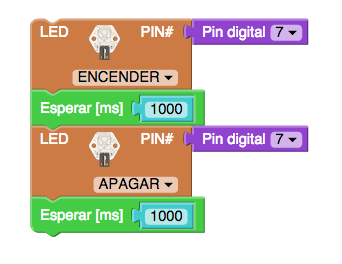
3.1.1.2. Automatizar un LED para encenderlo y apagarlo en el tiempo.
Si queremos que el LED se encienda por un tiempo determinado y se apague podremos usar la funcion Espera:
la encontraremos en el menu de control:
Sabemos que 1s (segundo) es igual a 1000ms (milisegundos) entonces porgramamos de la siguiente manera:
3.1.2. Zumbador:

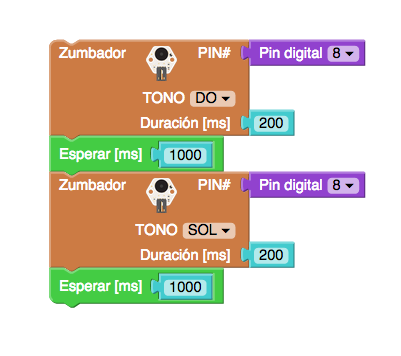
El Zumbador o Buzzer es un componente de salida que emite zumbidos con diferentes frecuencias. Vibra de una forma similar a un altavoz y puede reproducir la frecuencia que queramos. Con bitbloq podemos decirle la nota que queramos y el interpreta la frecuencia correspondiente a la nota.
P0r ejemplo: LA central es 440hz.
Ejercicio:
3.1.2.1. Haciendo notas musicales:
3.1.3. Motor miniservo:
Un miniservo es un pequeño motor que es capaz de girar entre 0 y 180 grados,o lo que es lo mismo, la mitad de una circunferencia.

Ejercicio:
3.1.3.1. Moviendo un motor Servo a una posición exacta en grados de 0 a 180 grados:
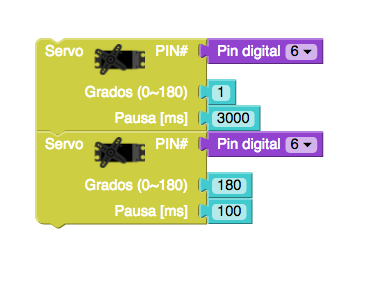
3.1.4. Motor Servo de Rotación continua:
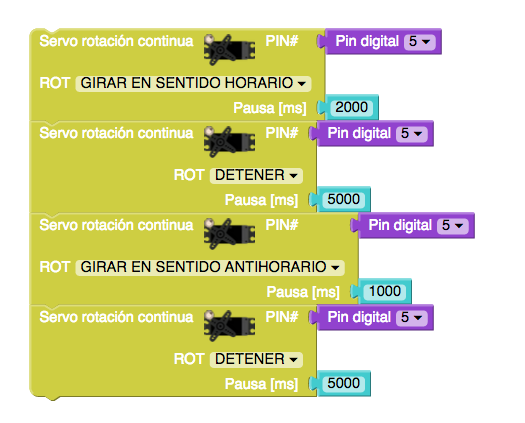
Un servomotor de rotación continua es más grande que el miniservo y su funcionamiento se parece al de un motor convencional. Este servo no se detiene en una posición sino que puede girar en un sentido continuamente, de ahí su nombre.
En trigonometría y astronomía los ángulos y arcos tienen un sentido de giro, sentido horario o sentido antihorario, de lo que depende que sean considerados positivos o negativos. El sentido horario es el sentido del reloj y el sentido antihorario es el opuesto.


Ejercicio:
3.1.4.1. Girar un motor en sentido horario, en sentido antihorario y detenerlo.
3.2. ENTRADAS DIGITALES:
3.2.1. Pulsador:
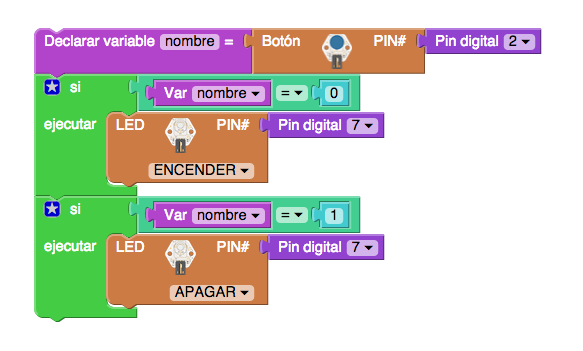
El pulsador o botón es un dispositivo digital de entrada que se activa cuando se pulsa con el dedo, permitiendo que circule por él la corriente, y se desactiva cuando se deja de pulsar.
El pulsador es un dispositivo de entrada que puede devolver dos estados: 1 y 0. Es decir: pulsado y no pulsado.
Ejercicios:
3.2.1.1 Pulsador enciende led.
3.2.1.2 Pulsador que controla activación de Servo de Rotación continua :
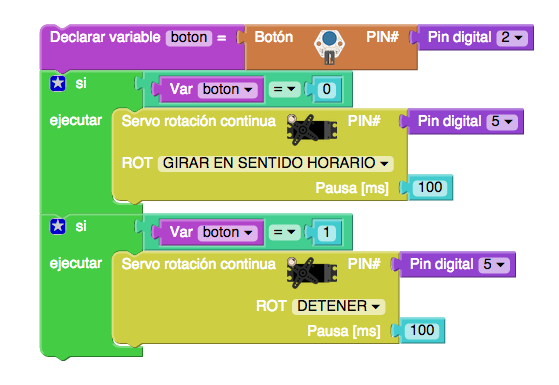
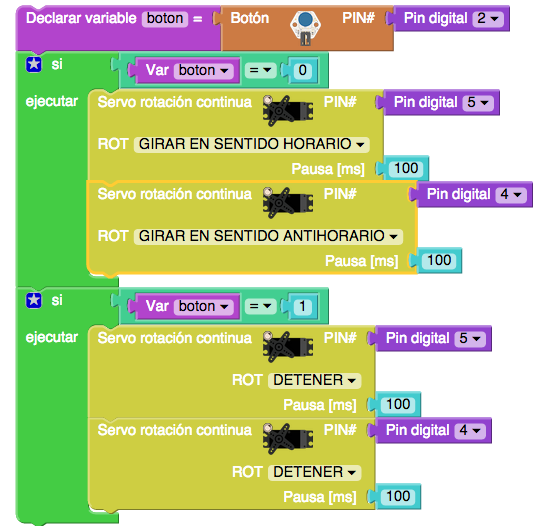
3.2.1.3 Conectando dos Servos de Rotación continua (ruedas de un coche):
Ahora vamos a conectar 2 motores Servo de rotación continua, lo conectamos en otro pin y le decimos que gire en sentido antihorario. Podrian ser las ruedas de un coche!
3.2.2. Sensor IR:
El sensor infrarrojo, también conocido como sensor IR, es un dispositivo que detecta la luz reflejada y, por tanto, es capaz de diferenciar entre blanco y negro o claro y oscuro.
Se trata de un componente digital, ya que únicamente devuelve dos valores (0 y 1). Cuando detecta negro devuelve 0 (el negro absorbe la luz, por tanto la luz reflejada, que es lo que mide el sensor, es cero) y cuando detecta blanco, 1.

Ejercicio:
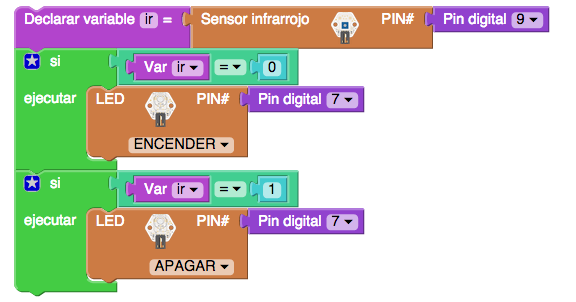
3.2.2.1. Activación de un led con un sensor IR:
3.3. ENTRADAS ANALOGICAS:
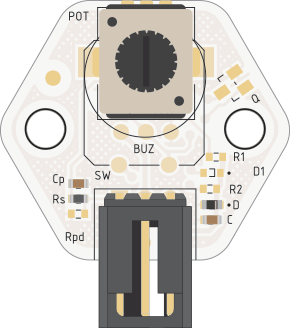
3.3.1. Potenciómetro:
Un potenciómetro es una resistencia variable que depende del giro de una perilla.

Ejercicios:
3.3.1.1 Potenciómetro que mueve Motor mini servo:

3.3.1.2. Potenciómetro regula la frecuencia del sonido del Zumbador: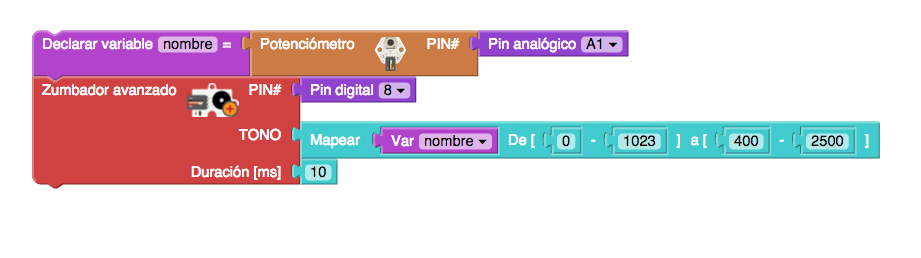
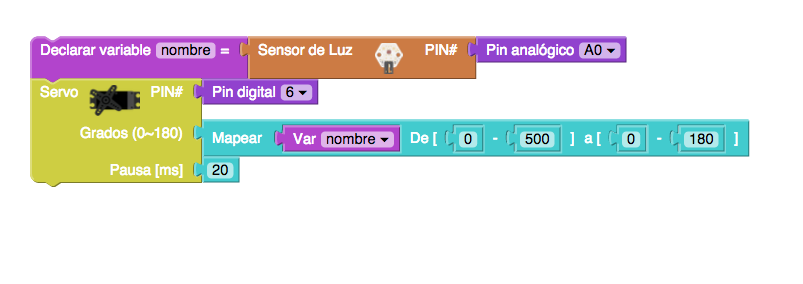
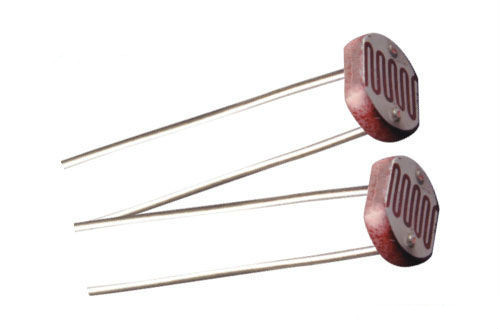
3.3.2. Sensor de Luz: (Fotorresistencia o LDR)
Es una resistencia variable que varia con la variación en la luz. En un sensor de luz de Mi primer kit de Robótica de BQ, este valor oscilara entre 0 y 500, aproximadamente.

Ejercicios:
3.3.2.1. Sensor de Luz controla movimiento de Motor miniservo: